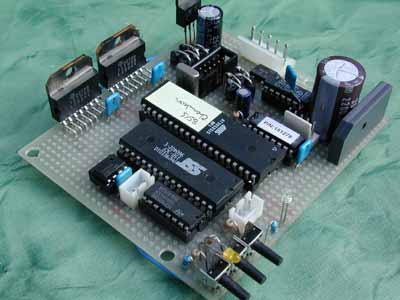




| Die erste Version der Scheinwerferelektronik ist noch relativ aufwenig: ein 40-poliger Controller und ein 28-poliger Flash-Baustein. Hinten links die beiden H-Brücken für die bipolaren Schrittmotoren. |
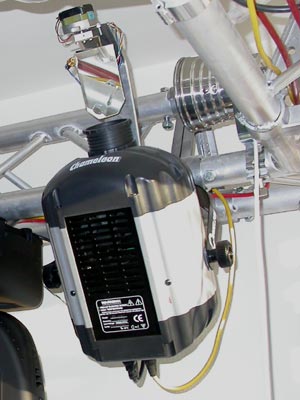
| Schaltung eingebaut im Scheinwerfer |
| Die zweite Version der Elektronik ist deutlich einfacher, platzsparender und billiger: dank verbesserter Firmware und Übertaktung genügen nur noch zwei kleine Controller. |
| Farbscheibe auf Schrittmotor |
| Ein sauberes Platinenlayout ist Garant für störungsfreien Betrieb ohne EMV-Probleme. Das ist mir allerdings wurscht. |
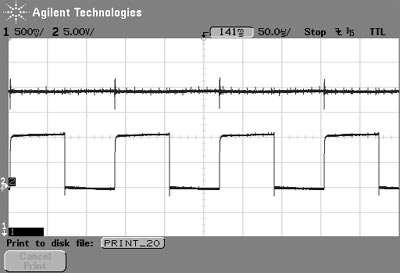
| Auf Messkanal 1 (oben) ist die 5V-Versorgungsspannung des Mikrocontrollers, auf Kanal 2 (unten) die Spannung an einer Schrittmotorwicklung. Deutlich zu erkennen sind die Peaks mit einer Amplitude von bis zu 0.5V im 5V-Zweig, sobald die Motorspule bestromt wird. Dennoch arbeitet die Schaltung bis etwa 85°C stabil. |



